We live in a world where location is
the key for many activities, and computer vision
plays a key role for answering the fundamental questions for location-based reasoning and mapping: (1) Where am I? (2) Where i am going? (3) How do i get there? The future world, not too far from our real life, would be full of autonomous robotics and AI agents: autonomous vehicles, autonomous taxis, autonomous delivery vans, autonomous drones, autonomous robotics etc. and location-based reasoning, especially mapping, has drawn a lot of attention from the computer vision community recently, both academia and industry.
This tutorial session brings together people from around the world who are practicing computer vision research for mapping/location- based reasoning in both industry and academia, and would cover the following topics of interests (including but not limited to):
Vision-based Map Making
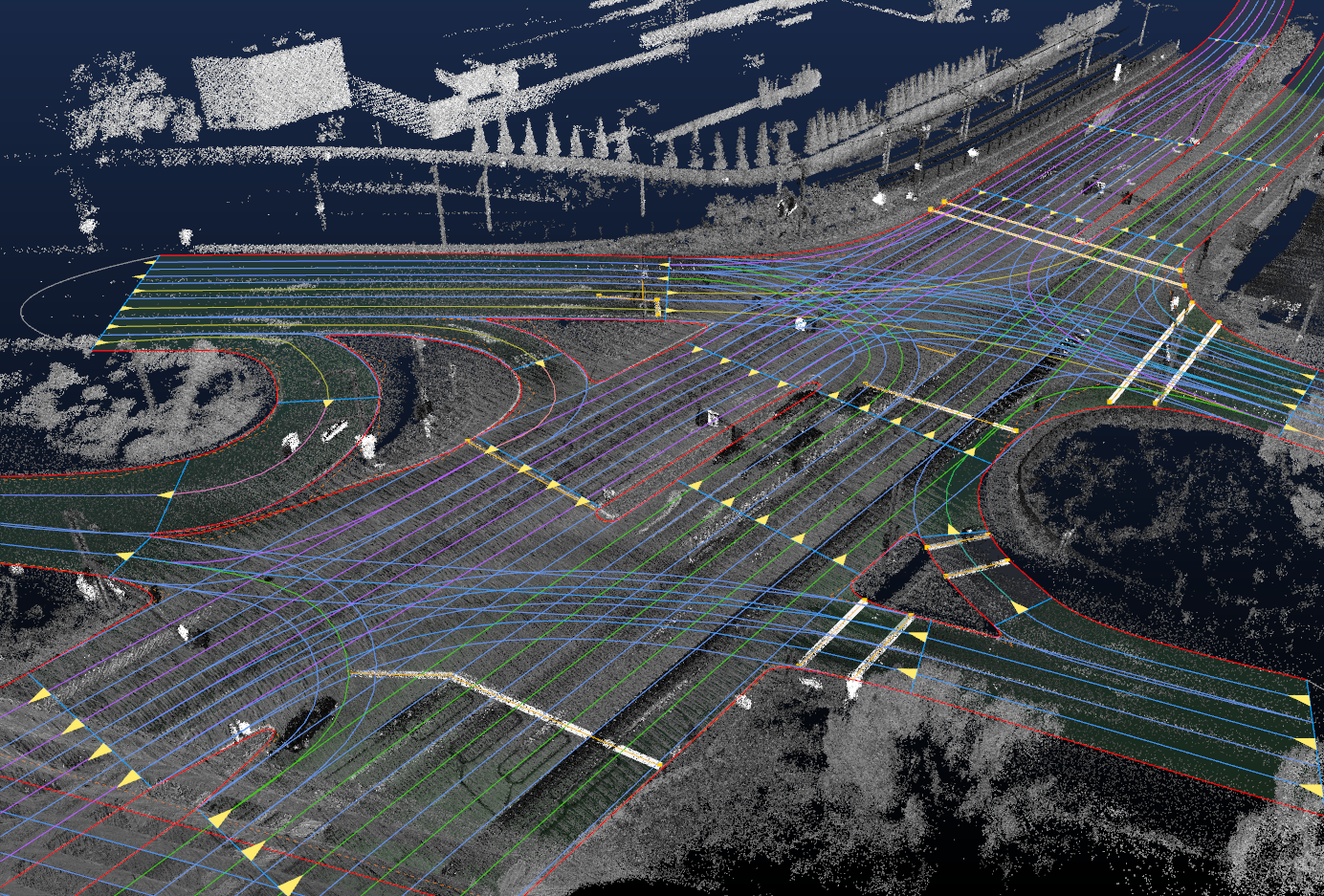
Vision-based High Definition Map Creation
Crowd Sourced-vision-based Map Creation
Semantic Map
Structure Map
Semantic Map vs. Structure Map
Vision-based Localization
Lidar-based Localization
Multi-sensor-based Localization
2D/3D Scene Understanding and Location-based Reasoning
2D/3D Visual Landmark Detection